Stop thinking
Start building
Move from the classroom to the workshop. Gain the hands-on experience, resources and team you need to bring your most complex ideas to life.
Delft Mercurians
RoboCup competition team
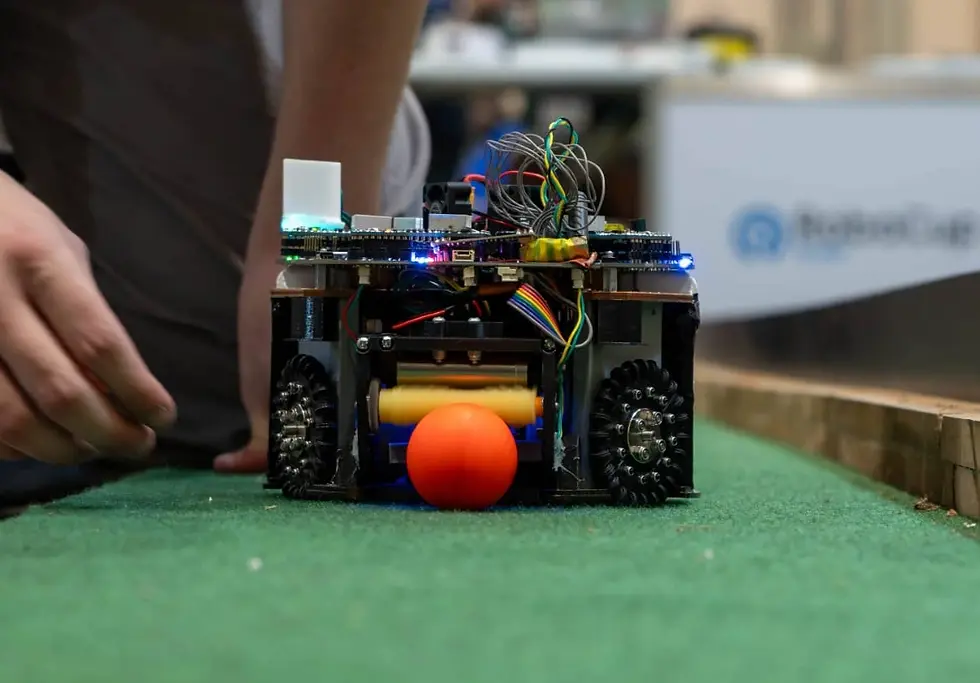
Participating in the RoboCup Small Size League. Developing fully autonomous football robots from the ground up. These robots play 10 minute long 6 vs 6 football matches against teams from all over the world.
Founded in 2022 and have since competed in Eindhoven, The Netherlands (2024) and El-Salvador, Brazil (2025).
Currently designing and manufacturing our next iteration of robots to compete at RoboCup 2026 in Seoul, South-Korea in July.
Delft Mercurians
RoboCup competition team
Participating in the RoboCup Small Size League. Developing fully autonomous football robots from the ground up. These robots play 10 minute long 6 vs 6 football matches against teams from all over the world.
Founded in 2022 and have since competed in Eindhoven, The Netherlands (2024) and El-Salvador, Brazil (2025).
Currently designing and manufacturing our next iteration of robots to compete at RoboCup 2026 in Seoul, South-Korea in July.

Delft Neptunians
RoboSub competition team
Aiming to participate in the RoboSub competition. Developing underwater robots that autonomously complete various tasks and challenges, including mapping, launching projectiles, and object manipulation.
Currently designing and manufacturing the second iteration of the robot to compete in RoboSub 2027
Delft Neptunians
RoboSub competition team
Aiming to participate in the RoboSub competition. Developing underwater robots that autonomously complete various tasks and challenges, including mapping, launching projectiles, and object manipulation.
Currently designing and manufacturing the second iteration of the robot to compete in RoboSub 2027

Delft Dryad
Autonomous tracking drones
Drones that autonomously follow and record people in an open space, with obstacle avoidance and high agility.
Suitable for use cases such as search and rescue, action videography and tactical operations.
Currently designing and manufacturing the first iteration of a drone.
Delft Dryad
Autonomous tracking drones
Drones that autonomously follow and record people in an open space, with obstacle avoidance and high agility.
Suitable for use cases such as search and rescue, action videography and tactical operations.
Currently designing and manufacturing the first iteration of a drone.

Micro Drones
Compact swarming drones
Making drones that are as small as possible and able to communicate with each other. Suitable for large-scale inspection, inspection in difficult spaces and inspection using synthetic aperture imaging.
Currently designing and manufacturing the first iteration of a drone.
Micro Drones
Compact swarming drones
Making drones that are as small as possible and able to communicate with each other. Suitable for large-scale inspection, inspection in difficult spaces and inspection using synthetic aperture imaging.
Currently designing and manufacturing the first iteration of a drone.

Wire EDM
Custom manufacturing metal parts
Creating a cost-efficient Wire EDM to produce dimensionally accurate custom metal parts, for a fraction of the cost of a regular Wire EDM.
Enabling cost-efficient metal manufacturing without the need for a big workspace.
Currently designing and manufacturing the second iteration of the Wire EDM.
Wire EDM
Custom manufacturing metal parts
Creating a cost-efficient Wire EDM to produce dimensionally accurate custom metal parts, for a fraction of the cost of a regular Wire EDM.
Enabling cost-efficient metal manufacturing without the need for a big workspace.
Currently designing and manufacturing the second iteration of the Wire EDM.

Open Fish
Bio-inspired underwater robotics
Creating a cost-efficient soft robotic fish using off the shelf hardware, including a working mechanical tail and fins.
Suitable for non-disruptive marine inspection, inspection in confined spaces, and soft robotics research.
Open Fish
Bio-inspired underwater robotics
Creating a cost-efficient soft robotic fish using off the shelf hardware, including a working mechanical tail and fins.
Suitable for non-disruptive marine inspection, inspection in confined spaces, and soft robotics research.

You vs Cobot
Autonomous chess playing robot arm
A cost-efficient, accurate cobot robot arm, utilizing cycloidal drives that uses computer vision to autonomously perform tasks using ArUco markers.
The first iteration will be able to play chess autonomously.
Suitable for a wide range of autonomous tasks, as a substitute for expensive robot arms, at a fraction of the price.
You vs Cobot
Autonomous chess playing robot arm
A cost-efficient, accurate cobot robot arm, utilizing cycloidal drives that uses computer vision to autonomously perform tasks using ArUco markers.
The first iteration will be able to play chess autonomously.
Suitable for a wide range of autonomous tasks, as a substitute for expensive robot arms, at a fraction of the price.

Project Echo
Robot learning
Creating a robot with two arms mounted on a frame. Utilizing computer vision it can replicate human arm movements using a camera.
Eventually the project can be evolved into a humanoid robot. Suitable for a platform for imitation learning, and reinforcement learning, eventually moving from direct human control to autonomous task execution.
Project Echo
Robot learning
Creating a robot with two arms mounted on a frame. Utilizing computer vision it can replicate human arm movements using a camera.
Eventually the project can be evolved into a humanoid robot. Suitable for a platform for imitation learning, and reinforcement learning, eventually moving from direct human control to autonomous task execution.